破解具身智能「不可能的三角」
本体、模型、数据三大要素中,数据是真正的壁垒。手亿以可穿戴 POV 方案实现「低成本、高质量、规模化」数据闭环,采集其他方案无法触及的真实场景。

多传感器严格标定与帧同步
头戴与腕带设备间帧同步精度<5ms,具身智能训练场景对同步要求极高,普通摄像机完全无法达到
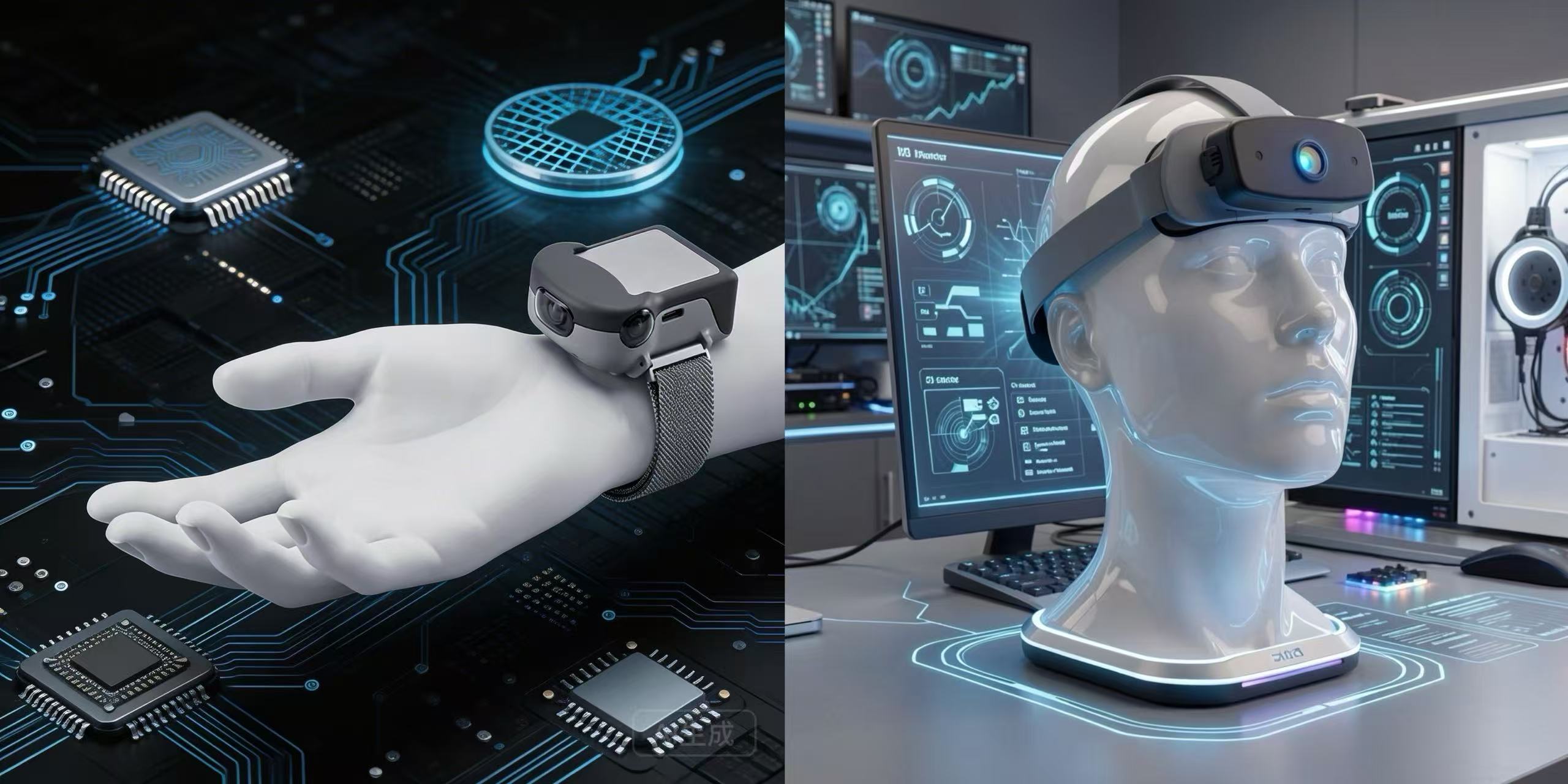
头戴 + 腕带双设备协同
头戴设备捕捉腕带无法获取的手部动作和空间信息,鱼眼镜头广视角多目视觉提供场景深度数据,互为补充完整覆盖
多模态大模型智能处理
本地存储每帧画面,输入多模态大模型后生成场景三维建模及人体运动轨迹,输出完整空间动作信息
核心技术壁垒
从硬件到算法,构建具身智能数据采集的完整技术壁垒
清华 20 年技术积累
学术最早 | 顶会论文 | 核心专利
实验室最早提出基于腕带视觉的手部重建与状态估计,Google Scholar 引用 2000+,技术获 CHI、Nature 子刊等顶会论文 + 核心专利双重验证
全场景三维重建能力
双目深度感知 | 3D 建模生成 | 距离测算
头戴设备鱼眼镜头广视角多目视觉提供场景深度信息,结合腕带相机和 IMU,实现全场景三维重建和精准距离测算
多模态大模型融合输出
本地存储 | 智能建模 | 轨迹生成
本地存储每帧画面,输入多模态大模型后自动生成场景三维建模及人在场景内的运动轨迹,直接服务于 AI 训练